IE5 660-1140V TBVF Partlama garşy pes tizlikli hemişelik magnit sinhron motor



Önümiň spesifikasiýasy
| Bellik | EX db I Mb |
| Bahalandyrylan naprýa .eniýe | 660,1140V ... |
| Kuwwat diapazony | 37-1250kW |
| Tizlik | 0-300rpm |
| Quygylyk | Üýtgeýän ýygylyk |
| Tapgyr | 3 |
| Polýuslar | Tehniki dizaýn boýunça |
| Çarçuwanyň diapazony | 450-1000 |
| Gurnamak | B3, B35, V1, V3 ..... |
| Izolýasiýa derejesi | H |
| Gorag derejesi | IP55 |
| Iş borjy | S1 |
| Custöriteleşdirilen | Hawa |
| Önümçilik sikli | 30 gün |
| Gelip çykyşy | Hytaý |
Önüm aýratynlyklary
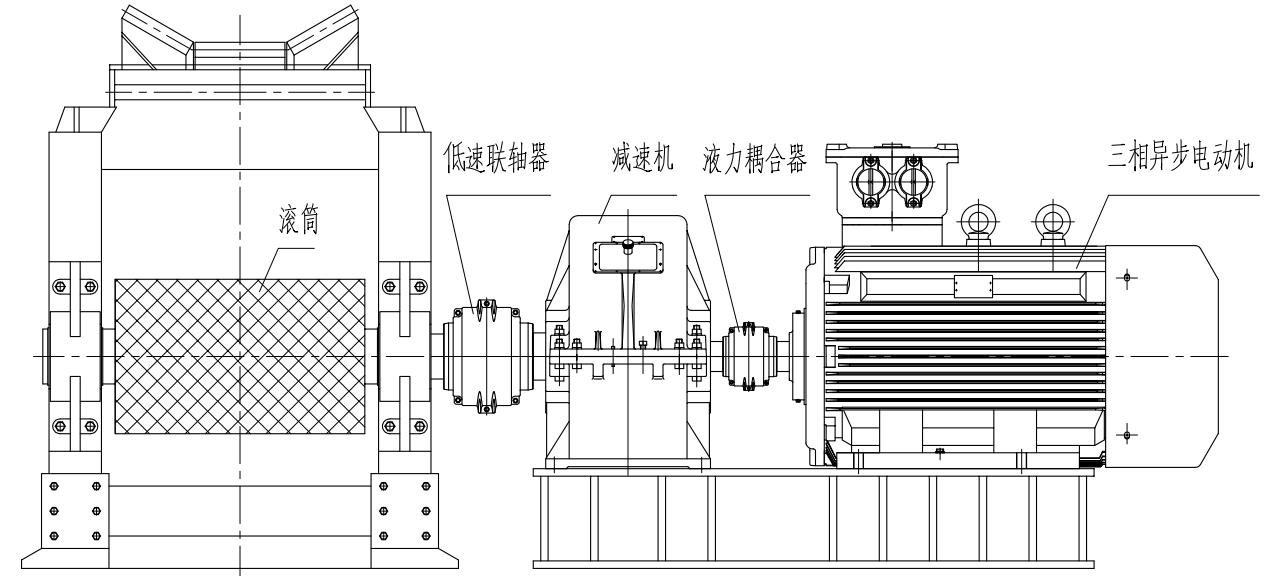
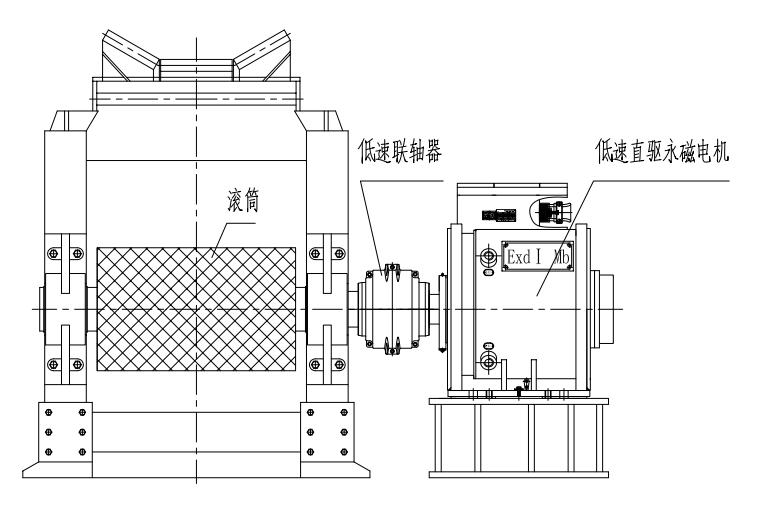
1. Dişli gutyny we gidrawliki birikmäni aýyryň. geçiriş zynjyryny gysgaldyň. nebitiň syzmagy we ýangyç guýmak meselesi ýok. pes mehaniki näsazlyk derejesi. ýokary ygtybarlylygy.
2. Enjamlara görä ýöriteleşdirilen elektromagnit we gurluş dizaýny. ýüküň zerur tizligini we tork talaplaryny gönüden-göni kanagatlandyryp biler;
3. Pes başlangyç tok we pes temperaturanyň ýokarlanmagy. Demagnetizasiýa töwekgelçiligini ýok etmek;
4. Diş gutusynyň we gidrawliki birikdirmäniň geçiriş netijeliligini ýok etmek. ulgamyň ýokary netijeliligi bar. ýokary netijelilik we energiýa tygşytlamak. Pleönekeý gurluş. pes iş sesi we gündelik tehniki hyzmatyň pes bahasy;
5. Rotor böleginiň aýratyn goldaw gurluşy bar. podşipnikini saýtda çalyşmaga mümkinçilik berýär. zawoda gaýdyp gelmek üçin zerur maddy-tehniki çykdajylary aradan aýyrmak;
6. Hemişelik magnit sinhron hereketlendirijisiniň göni hereketlendiriji ulgamyny kabul etmek "uly atyň kiçi arabany çekmek" meselesini çözüp biler. asyl ulgamyň giň ýük aralygynyň talaplaryny kanagatlandyryp biler. we ulgamyň umumy netijeliligini ýokarlandyrmak. ýokary netijelilik we energiýa tygşytlamak bilen;
7. Wektor ýygylygy öwrüji dolandyryşyny kabul ediň. tizlik aralygy 0-100%, işe başlamak gowy. Durnuk iş. Hakyky ýük güýji bilen gabat gelýän koeffisiýenti azaldyp biler.
Haryt amaly
Bu önüm janköýerler, nasoslar we guşak maşynlary ýaly dürli enjamlary çekmek üçin ýer astynda giňden ulanylýan kömür magdan enjamlaryny ugrukdyryp biler.






Sorag-jogap
Pes tizlikli (rpm) motor saýlamagyň esasy nokatlary haýsylar?
1. Sahypadaky iş tertibi:
Typeük görnüşi, daşky gurşaw şertleri, sowadyş şertleri we ş.m.
2. Asyl geçiriş mehanizminiň düzümi we parametrleri:
Reduktoryň adynyň parametrleri, interfeýsiň ululygy, diş gatnaşygy we şahanyň deşigi ýaly pyçak parametrleri.
3. Düzediş niýeti:
Hususan-da, göni sürüjini ýa-da ýarym göni sürüjini etmelimi, motoryň tizligi gaty pes bolany üçin, ýapyk aýlawly gözegçilik etmeli we käbir inwertorlar ýapyk görnüşli dolandyryşy goldamaýarlar. Mundan başga-da, hereketlendirijiniň netijeliligi pes, motoryň bahasy has ýokary bolsa, tygşytly däl. Güýçlendirmek ygtybarlylygyň we tehniki hyzmatyň artykmaçlygydyr.
Bahasy we çykdajylylygy has möhüm bolsa, tehniki hyzmatyň peselmegini üpjün etmek bilen ýarym göni hereketlendiriji çözgüdiň ýerlikli bolup biljek käbir şertleri bar.
4. Islege gözegçilik etmek:
Öwrüji markasynyň hökmanydygy ýa-da ýapyk aýlawyň zerurlygy, inwertor aragatnaşygynyň aralygyndaky hereketlendirijiniň elektron dolandyryş şkafy bilen enjamlaşdyrylmalydygy, elektron dolandyryş kabinetiniň haýsy funksiýalary bolmalydygy we uzakdaky DCS üçin haýsy aragatnaşyk signallary talap edilýändigi.
Asynkron hereketlendirijiler bilen deňeşdirilende deň ölçegdäki hemişelik magnit hereketlendirijileriniň ýitgileriniň arasynda esasy tapawut näme?
Az stator mis sarp edilişi, az rotorly mis sarp edilişi we pes rotorly demir sarp edilişi.





